Posted inPython Raspberry Pi Thai
[TH] VisionRobo Car: Drive Motor
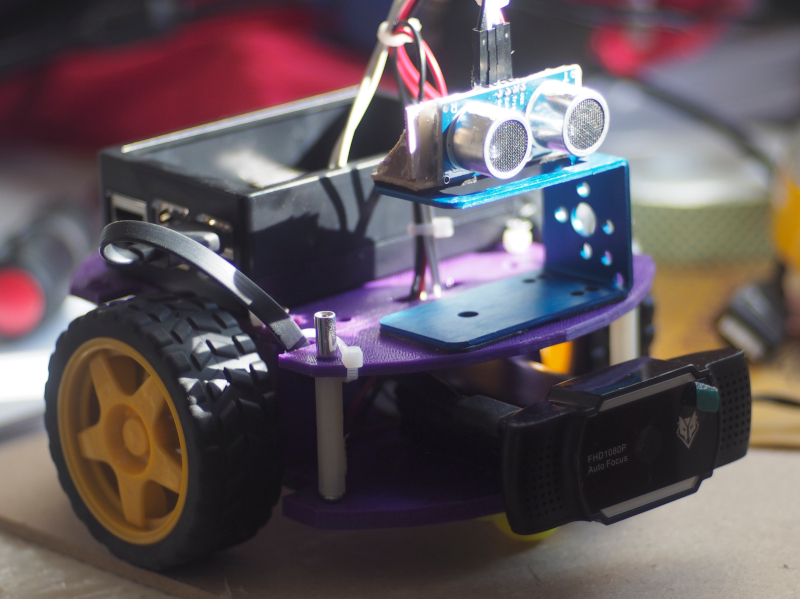
บทความนี้เป็นการเขียนโปรแกรมภาษาไพธอนเพื่อขับเคลื่อนหุ่นยนต์เคลื่อนที่ด้วยล้อ โดยตัวหุ่น VisionRobo car เป็นชุดหุ่นยนต์ที่ติดตั้งการเคลื่อนที่ด้วยมอเตอร์ไฟฟ้ากระแสตรงที่ติดกับชุดเฟืองจำนวน 2 ล้อ ใช้วงจรขับมอเตอร์กระแสตรงต่อเข้ากับบอร์ด Raspberry Pi และต่อโมดูลกล้องแบบ USB WebCamera และโมดูล Ultrasonic Sensor เพื่อใช้ในการประมวลผลภาพ และคำนวณระยะห่างของตัวหุ่นยนต์กับวัตถุรอบตัว