Posted inEnglish esp32s2 MicroPython
[EN] How to build MicroPython for esp32-s2.
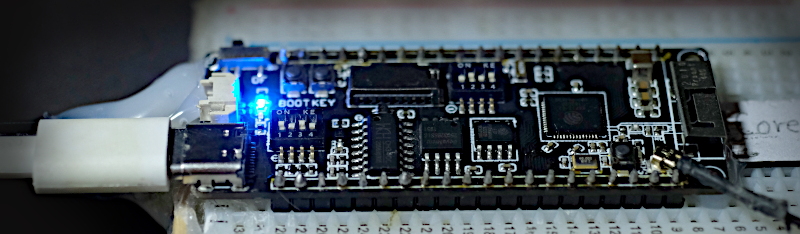
This article discusses compiling and using MicroPython for an esp32-s2 microcontroller based on the TTGO ESP32-S2 V1.1 or TTGO ESP32-S2-WOOR V1.1 board with a Type-C USB port and supports operation via CH340C and OTG by using a dip switch as shown in Figure 1, enabling MicroPython to be used because the chip program uses the CH340’s circuit programming and Python programming requires a port that works like OTG