Posted inArduino Arduino C/C++ Cortex-M0 Cortex-M3 Cortex-M4 Data Structure esp32 ESP32-C3 esp32s2 esp8266 STM32 Thai
[TH] Queue data structure with array and Singly Linked List.
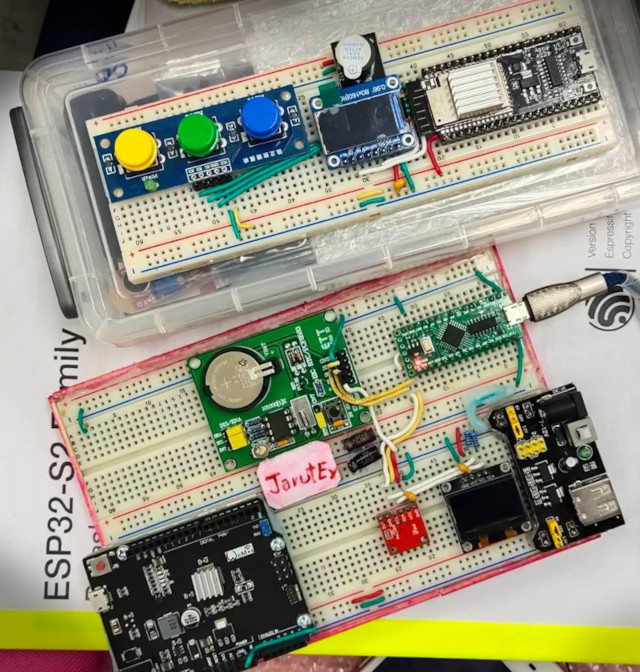
บทความนี้เป็นการอธิบายเกี่ยวกับโครงสร้างข้อมูลแบบคิว (Queue) ซึ่งได้เคยเขียนถึงไปในบทความ Queue Data Structure ที่เป็นภาษาไพธอนและถูกนำไปใช้บ่อยกับตัวอย่างของ MicroPython แต่บทความนี้เป็นภาษา C ที่เขียนผ่าน Arduino IDE เพื่อใช้งานกับบอร์ดไมโครคอนโทรลเลอร์ LGT8F328P, SAM-D21, ESP8266, ESP32 และ ESP32-S2 ดังภาพที่ 1 โดยยกตัวอย่างการนำโครงสร้างแถวลำดับ และลิงค์ลิสต์เดี่ยวมาเป็นโครงสร้างข้อมูลแบบคิว และคงเป็นบทความสุดท้ายบน JarutEx แล้วครับ