Posted indisplay esp8266 MicroPython sensor Thai Uncategorized
[TH] Using the DHT22/DHT11 Temperature and Humidity Sensor Module with ESP8266
บทความครั้งนี้เป็นการใช้งานโมดูลวัดค่าอุณหภูมิและความชื้น DHT22 และ DHT11 ด้วยภาษาไพธอน ซึ่งเป็นโมดูลเซ็นเซอร์ที่ทำงานด้วยการใช้สายสัญญาณเพียงเส้นเดียว ทำให้ประหยัดพอร์ตของไมโครคอนโทรลเลอร์ในการเชื่อมต่อกับโมดูลเซ็นเซอร์ นอกจากนี้ MicroPython มีไลบรารีเตรียมไว้สำหรับการใช้งาน DHT22 และ DHT11 จึงสะดวกและประหยัดเวลา ลดความผิดพลาดที่อาจจะเกิดจากการเขียนโปรแกรมด้วยตนเอง
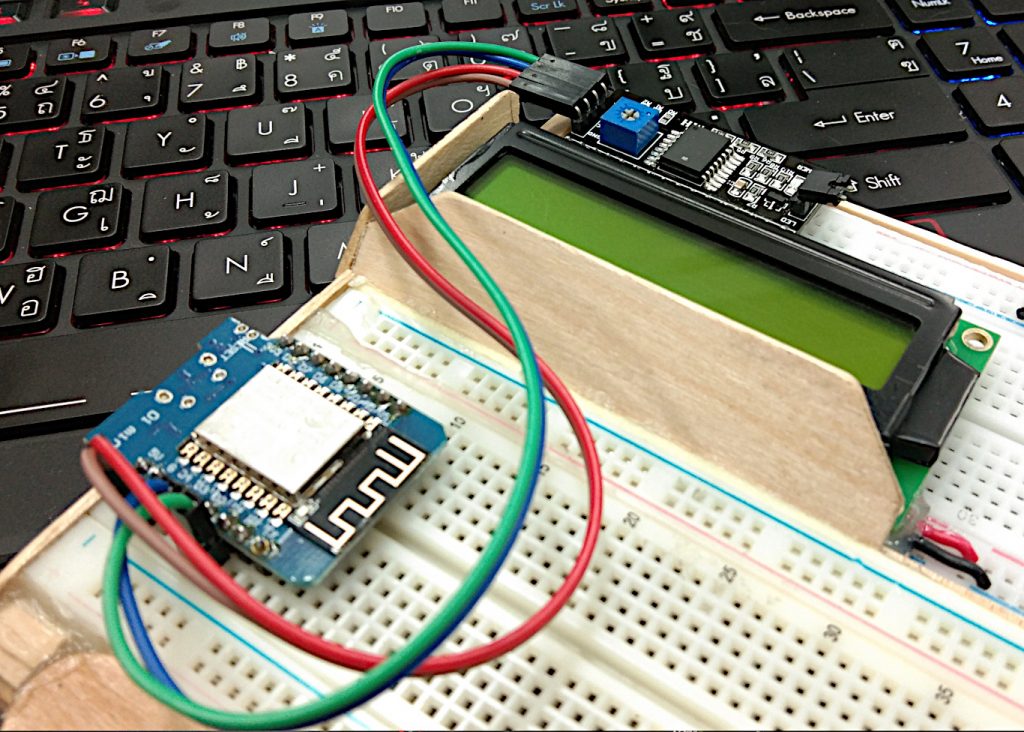
ตัวอย่างในบทความนี้มี 3 ตัวอย่าง code17-1 เป็นการอ่านค่ามาแสดงผลแบปกติ แต่ code17-2 เป็นการวนรอบเพื่ออ่านซ้ำ โดยนำค่าที่อ่านมาหาค่าน้อยสุดและต่ำสุด พร้อมทั้งแสดงออกทางโมดูลแอลซีดีดังภาพที่ 8 และตัวอย่าง code17-3 เป็นการแสดงค่าเฉลี่ยของอุณหภูมิและความชื้น