Posted inesp32 esp8266 MicroPython Python Raspberry Pi Thai
[TH] How to finds the nth data from a list?
บทความนี้เรามาทำความเข้าใจและเขียนโปรแกรมเพื่อหาข้อมูลลำดับที่ n จากลิสต์ของข้อมูลด้วยภาษาไพธอน โดยทดสอบกับ Python และ Micropython กัน
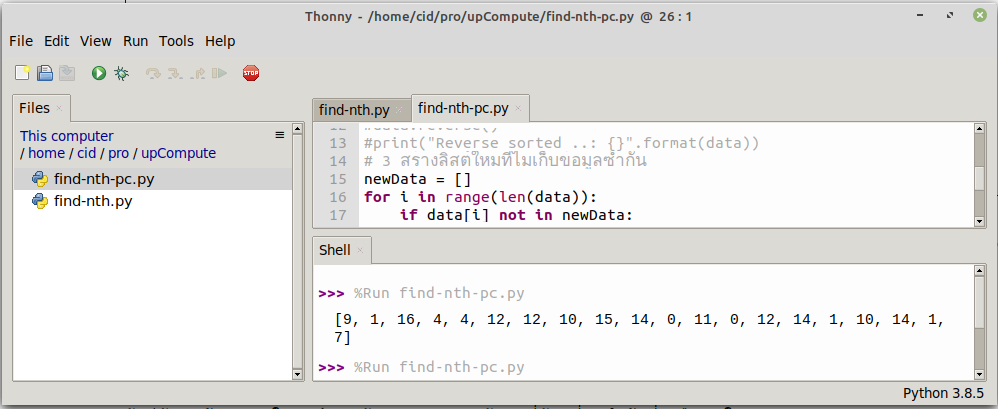
บทความนี้เรามาทำความเข้าใจและเขียนโปรแกรมเพื่อหาข้อมูลลำดับที่ n จากลิสต์ของข้อมูลด้วยภาษาไพธอน โดยทดสอบกับ Python และ Micropython กัน
บทความนี้กล่าวถึงฟังก์ชันการใช้งานของบัส SPI ของเฟรมเวิร์ก Arduino เพื่อใช้กับ STM32F030F4P6, STM32F103C8, STM32F401, esp8266 และ esp32 ซึ่งการทำงานของบัสนี้ต้องการสายสัญญาณสำหรับสื่อสารระหว่างกันอย่างน้อย 3 เส้น คือ SCLK, MISO และ MOSI สำหรับทำหน้าที่ส่งสัญญาณนาฬิการะหว่างกันของผู้ส่งและผู้รับ ทำหน้าที่รับข้อมูลจากผู้ส่ง และใช้สำหรับส่งข้อมูลไปให้ผู้รับ
จากการใช้สายสัญญาณ 3 เส้นจะพบว่า สามารถส่งและรับข้อมูลพร้อมกันได้ ซึ่งแตกต่างกับการสื่อสารแบบบัส I2C ที่ใช้สาย SDA เพียงเส้นเดียวในการสื่อสาร ดังนั้น อาจจะกล่าวได้ว่า ด้วยความเร็วในการสื่อสารที่เท่ากัน บัสแบบ SPI จะรับและส่งข้อมูลได้โดยไม่ต้องรอสายสัญญาณว่าง ขณะที่ I2C จะต้องรอให้ว่างก่อน ด้วยหลักคิดนี้จึงทำให้ SPI รับ/ส่งข้อมูลได้รวดเร็วกว่า
นอกจากนี้ SPI ใช้วิธีการเลือกปลายทางที่ต้องการสื่อสารด้วยการสั่งให้ปลายทางรู้ด้วยการส่งสัญญาณไปที่ขา SS ของอุปกรณ์ปลายทาง ดังนั้น เมื่อเชื่อมต่อกับหลายอุปกรณ์จึงส่งผลให้ SPI ต้องการจำนวนขาในการทำงานที่มากกว่า ขณะที่ I2C ใช้การระบุคำแหย่งของอุปกรณ์ในการสื่อสารระหว่างกัน โดยยังคงใช้สาย SDA เพียงเส้นเดียวทำให้ประหยัดขาได้มากกว่า

บทความนี้เป็นการอธิบายเมธอดต่าง ๆ ของ Wire.h ซึ่งเป็นคลาสสำหรับสื่อสารกับอุปกรณ์ผ่านบัสประเภท I2C ที่ใช้สายสัญญาณ 2 เส้นเรียกว่า SDA และ SCL สำหรับรับส่งข้อมูลระหว่างกัน ศึ่งพวกเรามีบทความเกี่ยวกับการสื่อสารประเภทนี้ค่อนข้างเยอะ และใช้เป็นบัสหลักในการพัฒนาอุปกรณ์ขึ้นมาเองแล้วเรียกใช้งานผ่านบัส เข่น บทความการใช้ esp8266 เชื่อมต่อกัย Arduino Uno หรือ การใช้ esp8266 กับ stm32f030f4p6 เป็นต้น
บทความนี้เป็นการใช้งาน ADC (Analog-to-Digital Converter) และ DAC (Digital-to-Analog Converter) ของไมโครคอนโทรลเลอร์ ESP32 ด้วยภาษาไพธอนของ MicroPython ซึ่งเป็นคลาสย่อยชื่อ ADC และ DAC ซึ่งอยู่ภายใต้คลาส machine เพื่อเรียนรู้คลาสย่อยทั้งสอง พร้อมทั้งตัวอย่างโปรแกรมการใช้งานคลาสดังภาพที่ 1 เพื่อเป็นพื้นฐานสำหรับการนำไปพัฒนาต่อไป
บทความนี้เป็นการเรียนรู้การใช้งานคลาส Pin ซึ่งเป็นคลาสย่อยในคลาส machine ของ Micropython เพื่อใช้งานกับไมโครคอนโทรลเลอร์ ESP8266 หรือ ESP32 พร้อมทั้งกล่าวถึงหน้าที่ของขาของชิพทั้ง 2 ที่ควรทราบก่อนใช้งาน

บทความนี้เป็นเรื่องเกี่ยวกับการใช้คลาส _thread กับไมโครคอนโทรลเลอร์ ESP32 ซึ่งมีหน่วยประมวลผล 2 แกน (core) แต่อย่างไรก็ดีคลาสเธรดเป็นโมดูลที่เป็นส่วนย่อยจากโมดูล cython และขณะที่เขียนบทความยังไม่สมบูรณ์พร้อมใช้งาน โดยโครงสร้างของคลาสเป็นดังภาพที่ 1 และคลาสย่อย LockType เป็นดังภาพที่ 2

การสุ่มตัวเลขในภาษาไพธอนใช้คลาส random แต่ในระบบไมโครคอนโทรลเลอร์ไม่มีระบบที่สนับสนุนการสุ่มมากเหมือนในระบบคอมพิวเตอร์ทำให้ Micropython รองรับคำสั่งแตกต่างกันไปตามประเภทของชิพ โดยในบทความนี้กล่าวถึงการใช้ random กับไมโครคอนโทรลเลอร์ esp8266 และ esp32 ซึ่งมีคำสั่งให้ใช้งานเพียงสร้างตัวเลขสุ่ม และกำหนดค่า seed ของการสุ่มดังนี้

บทความนี้นำรายละเอียดของคลาส machine.RTC ของ Micropython มาเรียนรู้กัน โดยหน้าที่หลักของคลาสนี้คือ ออกแบบมาเพื่อเป็น RTC (Real-Time Clock) หรือนาฬิกาฐานเวลาจริง ภายในไมโครคอนโทรลเลอร์สำหรับเก็บวันที่และเวลาจึงทำให้สะดวกมากขึ้นเมื่อใช้งานร่วมกับชิพ ESP8266 หรือ ESP32 เนื่องจากสามารถเข้าถึง NTP เพื่ออ่านวันที่และเวลาจากอินเทอร์เน็ตหลังจากนั้นนำค่ามาเก็บลง RTC ทำให้มีวันที่และเวลาที่ถูกต้องพร้อมทั้งไม่ต้องเข้าถึงอินเทอร์เน็ตบ่อย ๆ เพื่ออ่านค่าดังกล่าวอีกครั้ง ซึ่งประหยัดการใช้วงจร RTC ภายนอกอีกด้วย

บทความนี้เป็นการเรียนรู้การใช้งานคลาส esp และ esp32 ที่เป็นคลาสสำหรับใช้งานเฉพาะกับไมโครคอนโทรลเลอร์ esp8266 และ esp32 เพื่อเข้าถึงคุณลักษณะเฉพาะ และความสามารถภายในของชิพทั้ง 2

จากบทความเรื่อง machine.Pin ได้กล่าวถึงการใช้งานขาของไมโครคอนโทรลเลอร์เพื่อนำเข้าข้อมูลและส่งออกข้อมูลไปแล้ว และในบทความการสื่อสารผ่านบัส I2C ซึ่งใช้คลาส machine.I2C เพื่อสื่อสารระหว่างอุปกรณ์ ในคราวนี้มารู้จักคลาส machine.SPI ซึ่งเป็นการสื่อสารอีกรูปแบบหนึ่งที่ได้รับการยอมรับถึงความเร็วในการทำงาน และนิยมใช้กับจอแสดงผลกราฟิก (บทความของ esp8266/esp32) หรือช่องอ่าน SD-Card (บทความของ esp8266, esp32)
