[TH] ESP-IDF Ep.10 : Control the Servo Motor with LEDC.
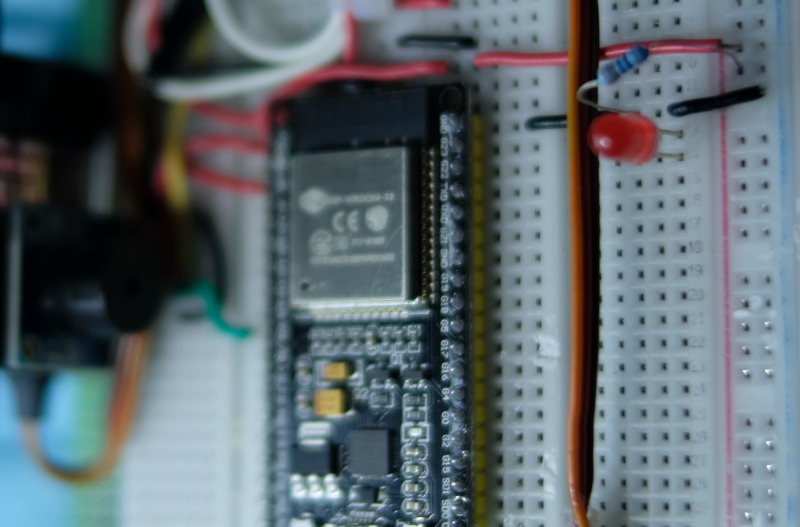
บทความนี้กล่าวถึงการใช้งานโมดูลเซอร์โวมอเตอร์ด้วยการใช้ GPIO ของ ESP32 ที่นำออกสัญญาณดิจิทัลแบบ PWM หรือ Pulse Width Modulation หรือ LEDC (LED Control) ซึ่งทำให้สามารถสร้างคลื่นความถี่ หรือปรับสัดส่วนของสถานะ 1 และ 0 ใน 1 ลูกคลื่น ที่มีความถี่ 50Hz โดยใช้บอร์ดทดลองดังภาพที่ 1