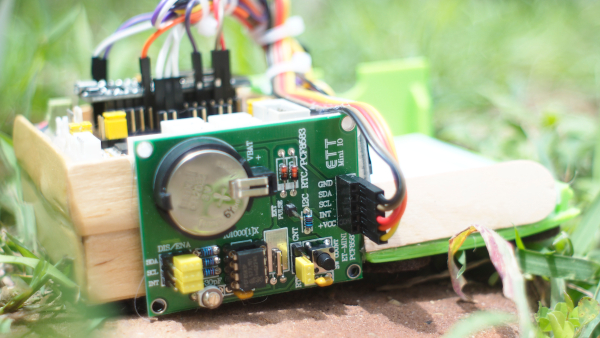
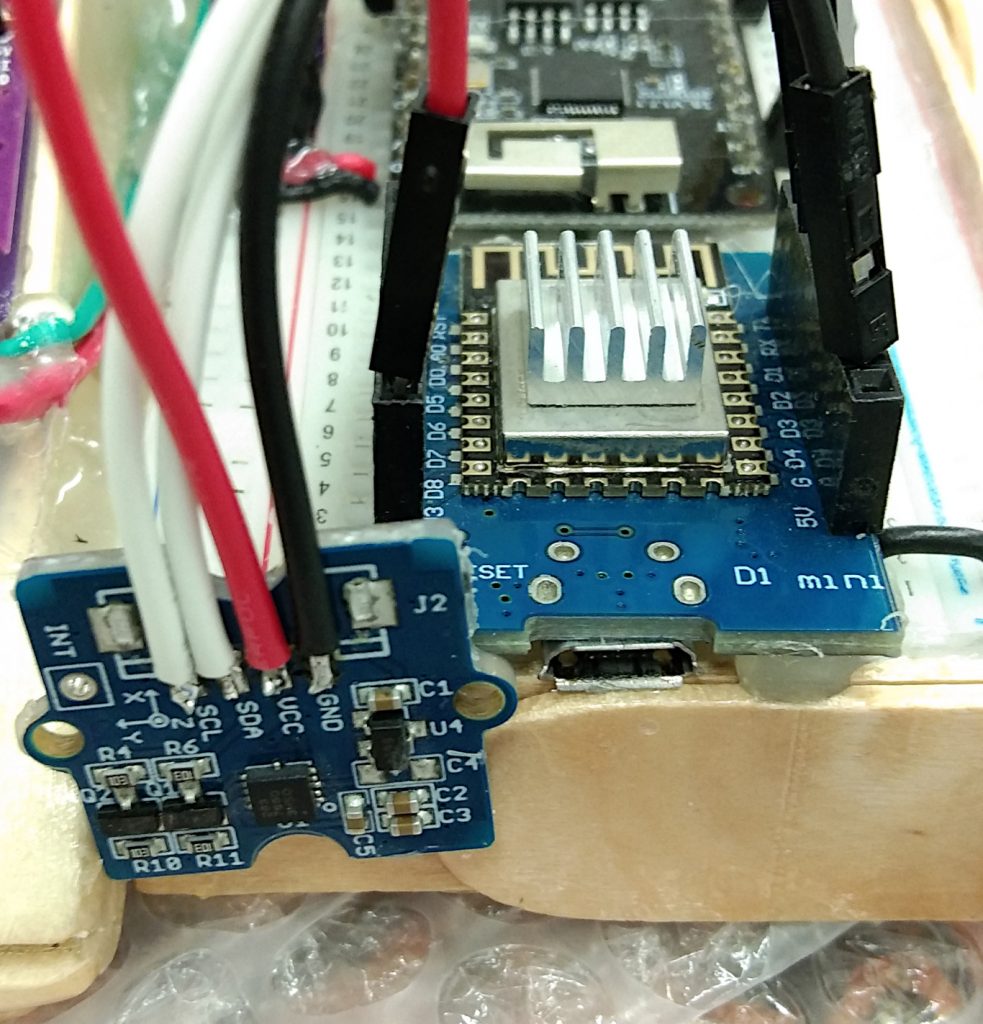
This article introduces the use of motion sensors or digital 3-axis shifting using MMA7660FC IC, which lets us know if this module shifts left/right or forward/backward or up/down, or rotates left/right or front/back and up/down. A library has been created to enable the sensor, set the sampling rate (sample rate), and display the converted value obtained from the module.
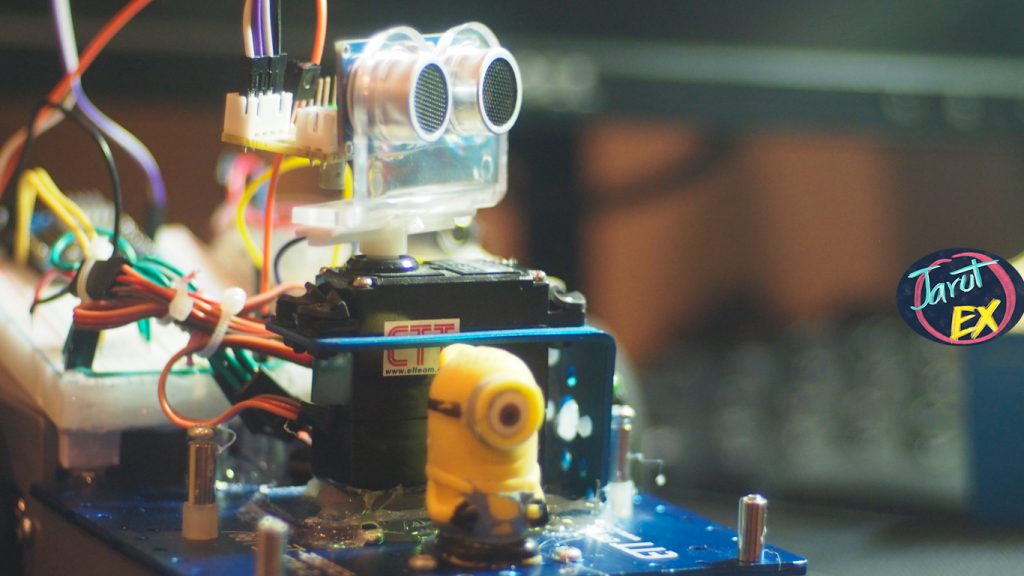
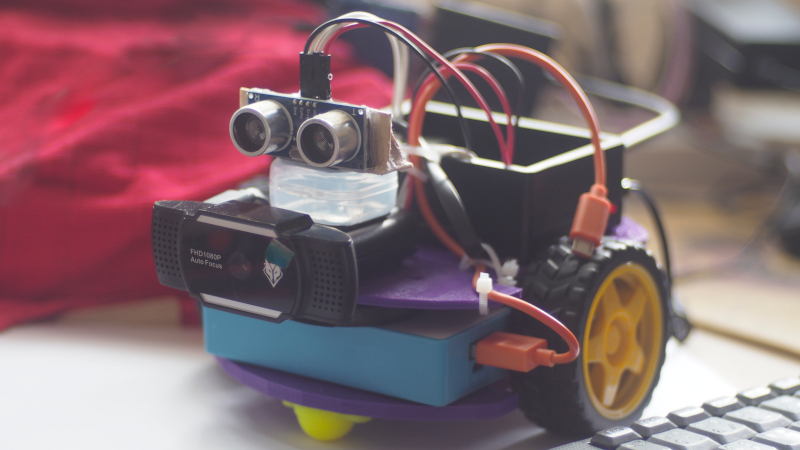
This article is an example of the implementation of the servo motor driven robot car mentioned in the previous article. Motion is used to define the motion rules under the factor of distance read from a distance sensor such as an ultrasonic sensor.