Posted inArduino Arduino C/C++ Thai
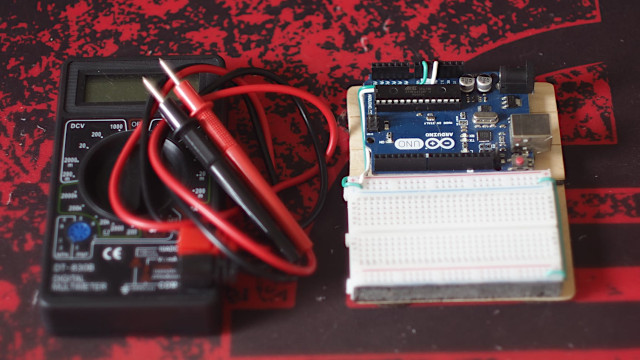
[TH] Arduino: Arduino Uno
บทความนี้แนะนำบอร์ด Arduino รุ่น Uno ซึ่งเป็นบอร์ดที่นิยมใช้ในการศึกษาการเขียนโปรแกรมเพื่อควบคุมอุปกรณ์ โดยกล่าวถึงคุณสมบัติของบอร์ด และการใช้ Arduino IDE รุ่น 2 (beta 7) เป็นพื้นฐานสำหรับการเขียนโปรแกรมต่อไป