Posted inAI esp32 esp8266 MicroPython Thai
[TH] ulab EP3 vector
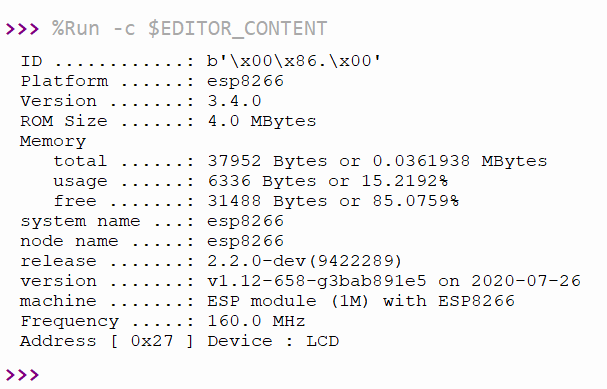
ในบทความเกี่ยวกับ ulab ในตอนที่ 3 นี้ เป็นเรื่องของโมดูลย่อย vector ของ ulab ที่ใช้สำหรับการคำนวณทางคณิตศาสตร์เช่นเดียวกับไลบรารี math ของ MicroPython โดยในเนื้อหาได้แสดงรายการฟังก์ชันที่ ulab บน ESP32 และ ESP8266 รองรับ พร้อมคำอธิบายหน้าที่ของฟังก์ชันนั้น ๆ