Posted inArduino C/C++ esp8266 Thai
[TH] Arduino: ควบคุมการเคลื่อนที่หุ่นยนต์รถผ่านบราวเซอร์ด้วย esp8266 Part 2
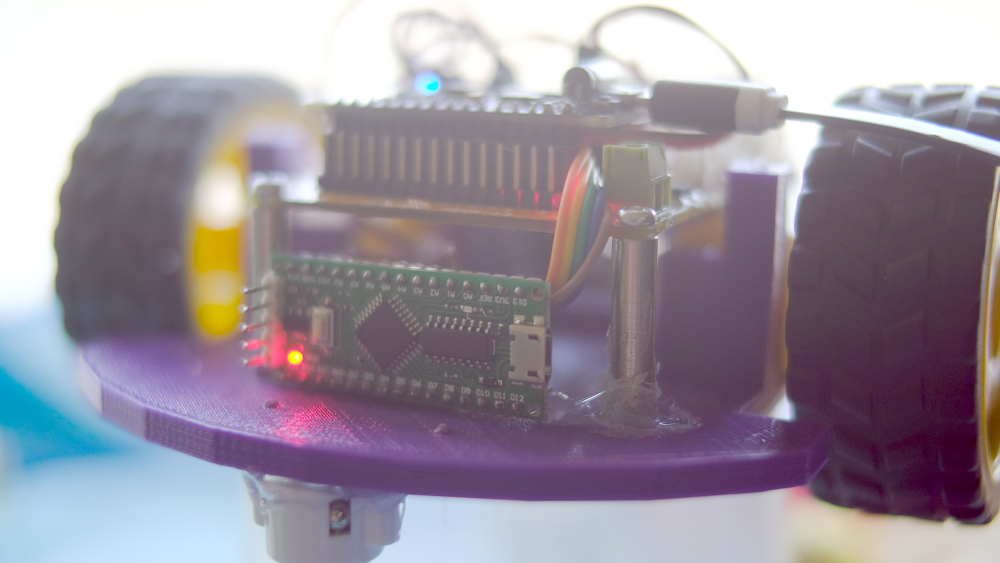
จากบทความก่อนหน้าที่ใช้ esp8266 เพียงตัวเดียวสำหรับการควบคุม Agent ซึ่งจำนวนขาที่ไมโครคอนโทรลเลอร์ esp8266 (ตามที่เขียนไว้ในบทความเกี่ยวกับ machine.Pin ของ MicroPython) มีให้นั้นมีจำกัด และหลายขาถูกใช้งานขณะเริ่มระบบทำให้เกิดความผิดพลาดที่ไม่ได้ตั้งใจ เช่น ล้อหมุนเมื่อระบบเริ่มทำงาน และหยุดเมื่อระบบทำการบูตเสร็จ เป็นต้น ดังนั้น ในบทความนี้จึงเพิ่มบอร์ดไมโครคอนโทรลเลอร์ LGT8F328P เข้ามา ดังภาพที่ 1 หรือผู้อ่านอาจจะเปลี่ยนเป็นไมโครคอนโทรลเลอร์ตระกูล Arduino อื่น ๆ แทนได้ เช่น Arduino Nano หรือ Arduino Uno เป็นต้น โดยให้ LGT8F328P นั้นเป็นส่วนของ Actuator ที่ทำหน้าที่เคลื่อนที่ไปในสิ่งแวดล้อม คือ สามารถสั่งให้เดินหน้า ถอยหลัง เลี้ยวซ้าย เลี้ยวขวา และหยุดได้ ทำให้ลดภาระการทำงานของ esp8266 ลง และให้ทำงานตอบสนองการสื่อสาร WiFi ได้มากขึ้น