Posted indisplay Python Raspberry Pi Thai
[TH] LEDs on/off via PyQt5 and serial communication.
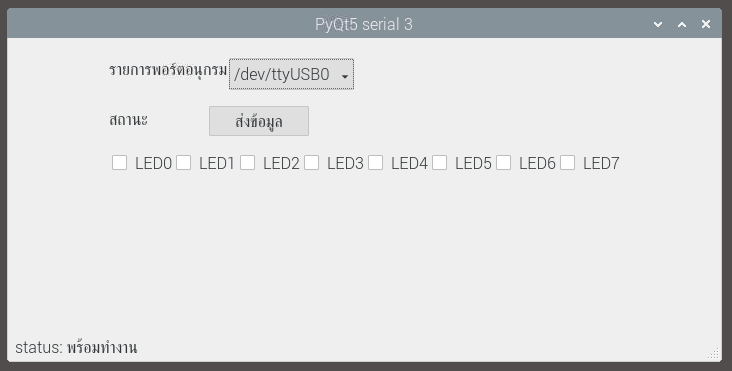
ในบทความนี้ใช้ความรู้จากบทความการอ่านรายชื่อพอร์ตอนุกรมที่ถูกเชื่อมต่อมาปรับปรุงให้เป็นการส่งข้อมูลส่งไปให้บอร์ด Arduino Uno ที่มีหลอดแอลอีดี (LED) เชื่อมต่ออยู่ที่ขา 2,3,4,5,6,7,8 และ 9 ทำให้ผู้ใช้งานสามารถสั่งเปิดหรือปิดหลอดดังกล่าวด้วยการสั่งงานผ่าน GUI (Graphics User Interface) ของ PyQt5 ดังภาพที่ 1 และส่งข้อมูลไปให้บอร์ด Uno ทางพอร์ตสื่อสารอนุกรมด้วย pySerial โดยในตัวอย่างครั้งนี้ การทำงานรองรับทั้งระบบปฏิบัติการ Windows, macOS และ Linux ซึ่งจะทำให้เห็นว่า PyQt5 และ pySerial สามารถรองรการทำงานกับทั้ง 3 ระบบได้