บทความนี้เป็นการใช้งานบอร์ดไมโครคอนโทรลเลอร์ 32 บิตภายใต้สถาปัตยกรรม RISC แบบ Cortex-M0 ที่มีราคาประหยัดแต่การทำงานนับว่าดีกว่าบอร์ดที่เป็นแบบ 8 บิตพอสมควร ประกอบกับมีวิธีการใช้งานให้ศึกษาอยู่บนอินเทอร์เน็ตมากมาย แต่อย่างไรก็ดีทางทีมพวกเราก็สร้างเป็นทางเลือกหนึ่งสำหรับผู้ที่สนใจได้อ่านกัน โดยบทความเริ่มจากเนื้อหาเกี่ยวกับคุณสมบัติของไมโครคอนโทรลเลอร์ การติดตั้งบอร์ดให้ Arduino IDE รู้จัก และตัวอย่างโปรแกรมการสั่งท็อกเกิ้ลหลอดแอลอีดี การรับส่งข้อมูลผ่านพอร์ตสื่อสาร USART และการทดสอบการหา Prime number เพื่อดูความเร็วในการประมวลผลในแบบการวนรอบซ้ำ ๆ กัน

STM32F030F4P6
ไมโครคอนโทรลเลอร์ STM32F030F4P6 มีคุณสมบัติดังนี้
- ใช้แกน (Core) แบบ 32 บิต รองรับความถี่สัญญาณนาฬิกาสูงสุด 48MHz (8MHz x 6)
- หน่วยความจำ Flash ROM 16KB
- หน่วยความจำ SRAM 4KB
- GPIO จำนวน 15 ขา
- ADC ความละเอียด 12 บิต
- ทำงานที่แรงดัน 2.4-3.6 VDC
- รองรับการสื่อสาร USART, I2C และ SPI
- มี WDT
- บนบอร์ดมี External XTAL ความถี่ 8MHz
- บอร์ดมีตัวแปลงแรงดัน 5VDC ให้เป็น 3V3
- บอร์ดมีการแยกขาสำหรับ RS232 (ทำ ISP) และ SWD (สำหรับ ST-Link)
- บอร์ดมีสวิตช์ NRST สำหรับรีเซ็ตการทำงาน
- บอร์ดมี Jumper สำหรับเลือกแรงดันของขา Boot0 ให้เป็น 3V3 หรือ GND สำหรับโหลดอัพโหลดกับรันโปรแกรม
การติดตั้ง
การติดตั้งบอร์ดให้ Arduino IDE รู้จักต้องใช้ JSON ของ Arduino Core STM32 ดังนี้ใน Preferences ของ Arduino IDE
https://github.com/stm32duino/BoardManagerFiles/raw/master/package_stmicroelectronics_index.json
หลังจากนั้นเข้า Board Manager เพื่อติดตั้ง STM32 MCU based boards จะได้รายการดังภาพที่ 2 ให้เลือกบอร์ดเป็น STM32 boards groups (board to be selected from Tools submenu “Board part number”) / Generic STM32F0 series ดังภาพที่ 2 และตั้งค่าต่าง ๆ ดังภาพที่ 3


อุปกรณ์ที่ต้องใช้
การอัพโหลดโปรแกรมเข้าบอร์ดต้องใช้โปรแกรม STM32CubeProgrammer ที่ต้องติดตั้งเอาไว้ก่อนเพื่อสั่งงานอุปกรณ์ ST-Link สำหรับเชื่อมผ่านพอร์ต SWD ดังภาพที่ 4 และ 5


ที่บอร์ดของ STM32F030F4P6 มีขั้ว ISP และ SWD ดังภาพที่ 6 เพื่อใช้ต่อกับ USB-Serial และ ST-Link/V2 ดังภาพที่ 7 และ 8


โหมดอัพโหลด
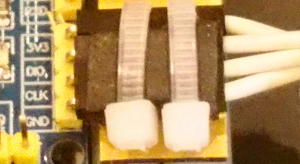
การอัพโหลดต้องเปลี่ยนโหมดด้วยการย้าย jumper ขั้ว BOOT0 มาไว้ ณ ตำแหน่ง 3V3 แล้วกดปุ่ม NRST ดังภาพที่ 9 และ 10


กรณีที่อัพโหลดไม่สำเร็จเนื่องจากไม่พบ STM32CubeProgrammer จะรายงานดังภาพที่ 11

ในบางกรณีที่ตั้งค่าทุกอย่างถูกต้องแต่ลืมเปลี่ยนโหมดการทำงานของ boot mode เป็นการอัพโหลดโปรแกรมจะรายงานดังภาพที่ 12

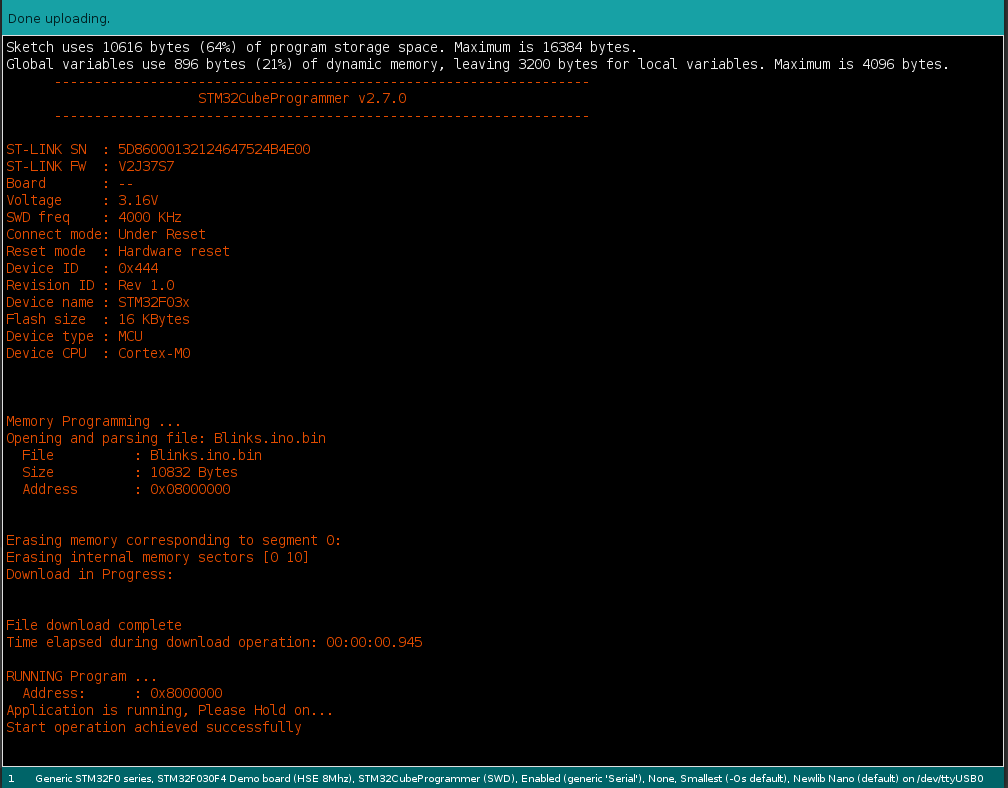
เมื่ออัพโหลดสำเร็จด้วยวิธีการอัพโหลดผ่าน RS232 จะรายงานผลดังภาพที่ 13 และกรณีที่ใช้ st-link จะรายงานดังภาพที่ 14

โหมดรันโปรแกรม
การรันทำโดยการย้ายตำแหน่งของ Jumper ขา Boot0 ไปไว้ที่ GND แล้วกดปุ่ม NRST ดังภาพที่ 15 และ 16


ตัวอย่างโปรแกรม
การ Blink
ตัวอย่างการสลับการส่งค่าของขา PA0, PA1, PA2, PA3 และ PA4 ระหว่าง 0 กับ 1 ทุก 500 มิลลิวินาทีที่ต่อเชื่อมกับภาค LED ของบอร์ดทดลอง ET-TEST I/O (ใช้มานานมาก) หรือ ET-TEST 10P/OUT เป็นดังนี้ และได้ผลลัพธ์ดังภาพที่ 17 และ 18
// Blink-4pins
uint8_t pins[] = {PA0, PA1, PA2, PA3, PA4};
void setup() {
for (int idx = 0; idx < 5; idx++) {
pinMode( pins[idx], OUTPUT );
}
}
void loop() {
for (int idx = 0; idx < 5; idx++) {
digitalWrite( pins[idx], !digitalRead( pins[idx] ));
}
delay(500);
}

การใช้งาน RS232
จากโค้ดของ Brian Lavery ที่เขียนเกี่ยวกับการใช้งานบอร์ด STM32F030F4P6 กับ Arduino ทำให้สามารถใช้งานคลาส Serial ได้ง่ายโดยไม่ต้องเขียนโค้ดแก้ไขการทำงานของไลบรารี ซึ่ง Brain Lavery ได้เพิ่มโค้ดโปรแกรม 3 ไฟล์เข้ามาเพื่อควบคุมการทำงานของการสื่อสารอนุกรมของบอร์ดดังนี้
- โค้ดของไฟล์ charQueue.h เป็นดังนี้
// Very basic class (char) array-as-queue BL Nov 2018
#define BUF_SIZE 40
class Queue
{
private:
bool _isFull() {
return (_size == BUF_SIZE);
};
bool _isEmpty() {
return (_size == 0);
};
char _buffer[BUF_SIZE];
int _head;
int _tail;
int _size;
public:
Queue(void) {
_head = 0;
_tail = BUF_SIZE - 1;
_size = 0;
};
bool enqueue(char ch) {
if (_isFull())
return false;
_tail = (_tail + 1) % BUF_SIZE;
_buffer[_tail] = ch;
_size ++;
return true;
};
int dequeue() {
if (_isEmpty())
return -1;
char ch = _buffer[_head];
_head = (_head + 1) % BUF_SIZE;
_size --;
return int(ch);
};
};
ไฟล์ของ miniSerial.h เป็นดังนี้
// Serial BitBash for STM32F030F4P6
#pragma once
#include <Arduino.h>
#define BITDELAY 52
// 104 9600 baud 52 19200
// not good above 19200
#define HEX 16
#define BIN 2
#define OCT 8
class MiniSerial
{
public:
MiniSerial(void);
void begin(int baudrate = 19200, int txpin = PA9, int rxpin = PA10);
int read(void);
void run(void);
void write(unsigned char data);
void print(double float_num, int prec = 2); // uses lots of flash space! Avoid?
void print(char* str);
void print(int, int = DEC);
void print(long, int = DEC);
void println(double float_num, int prec = 2);
void println(char* str = ""); // handles println() also
void println(int, int = DEC);
void println(long, int = DEC);
private:
int _getChar(void);
char _rx; // buffered chr
char _rx1 = 0;
int pinTx = -1; // -1 = not begin'd
int pinRx ;
unsigned long bitDelay = 52; // // 104 9600 baud 52 19200
enum { RXIDLE, READING, COMPLETE } ;
enum { RXBUSY = -4, ERRNOTBEGIN = -3, ERRFRAME = -2, RXNONE = -1 };
int rxState = RXIDLE;
unsigned long rx_chr = 0;
unsigned long rx_reftime = 0;
int rx_k;
};
extern MiniSerial mSerial;
#define Serial mSerialไฟล์ของ miniSerial.cpp เป็นดังนี้
// A bit-banged low-footprint serial transmit/receive
// primarily for low-memory STM32F030F4P6 BL Nov 2018
// By default uses PA9 as TX PA10 as RX -- regular 4-pin RX/TX end connector.
// 8 bit no parity. 19200 seems ideal (default)
// tx will block during character transfer (abt 0.6 mSec each chr at 19200)
// Your loop() must have free-running Serial.run(). No delay()s. Serial reception will suffer otherwise
// reception is buffered
// Transmit is not buffered, but does NOT stop reception processing.
// Functions in this "Serial" are an approximation to regular Serial calls.
// V 0.5.0
#include <miniSerial.h>
#include <charQueue.h>
Queue rxBuf;
//Queue txBuf; // Buffered tx not currently implemented
MiniSerial::MiniSerial(void)
{
}
void MiniSerial::begin(int baud, int tx, int rx)
{
pinRx = rx;
pinTx = tx;
bitDelay = (unsigned long) (1000000 / baud);
pinMode(pinTx, OUTPUT);
digitalWrite(pinTx, HIGH);
pinMode(pinRx, INPUT);
}
int MiniSerial::read(void) // -1 =nothing/empty
{
// fetch from buffer
return rxBuf.dequeue();
}
void MiniSerial::run(void) // MUST be called VERY frequently from your loop()
{
int ch = _getChar();
if (ch >= 0)
rxBuf.enqueue((char) ch);
}
void MiniSerial::print(char* str)
{
for (int i = 0; i < strlen(str); i++)
write(str[i]);
}
void MiniSerial::println(char* str)
{
print(str);
print("\n");
}
void MiniSerial::print(int j, int base)
{
char buffer[30];
itoa(j, buffer, base);
print(buffer);
}
void MiniSerial::print(long j, int base) // but for stm32, both int and long are 32bit!
{
print((int)j, base);
}
void MiniSerial::println(int j, int base)
{
print(j, base);
print("\n");
}
void MiniSerial::println(long j, int base)
{
print((int)j, base); // long 32bit = int 32bit
print("\n");
}
void MiniSerial::print(double float_num, int prec) {
// precision - use 6 maximum
int d = float_num; // get the integer part
float f = float_num - d; // get the fractional part
if (d == 0 && f < 0.0) {
write('-');
write('0');
f *= -1;
}
else if (d < 0 && f < 0.0) {
print(d);
f *= -1;
}
else {
print(d);
}
// only when fractional part > 0, we show decimal point
if (f > 0.0) {
write('.');
int f_shift = 1;
for (byte j = 0; j < prec; j++) {
f_shift *= 10;
}
print((int)(f * f_shift));
}
}
void MiniSerial::println(double float_num, int prec)
{
print(float_num, prec);
print("\n");
}
///////////////////////// HARDWARE IO:
int MiniSerial::_getChar(void) // bit-bang rx
// >=0 good rx char
{
if (pinTx < 0) return ERRNOTBEGIN;
switch (rxState) {
case RXIDLE :
if (digitalRead(pinRx)) // still idle
return RXNONE;
// ok, we start rx:
rx_reftime = micros() - bitDelay / 2;
rx_chr = 0;
rxState = READING;
rx_k = 0;
return RXBUSY;
case READING : // 10 bit-length passes
if (micros() - rx_reftime < bitDelay)
return RXBUSY;
rx_chr |= (digitalRead(pinRx) << rx_k++);
rx_reftime += bitDelay;
if (rx_k > 9)
rxState = COMPLETE;
return RXBUSY;
case COMPLETE :
rxState = RXIDLE;
if ((rx_chr & 0b01000000001) != 0b01000000000) // start & stop bits correct?
return ERRFRAME;
return (int) (rx_chr & 0x1FE) >> 1; // a good chr received
default:
break;
}
}
void MiniSerial::write(unsigned char data) // TX one byte
{
if (pinTx < 0) return;
int chr = (data << 1) | 0b011000000000 ;
unsigned long starttime = micros();
for (int i = 11; i > 0; i--) // 1 start (0), 8 data bits, 2 stop (11)
{
digitalWrite(pinTx, chr & 1);
chr = (chr >> 1);
while (micros() - starttime < bitDelay) {
run(); // keep processing incoming characters!!
}
starttime += bitDelay;
}
}
MiniSerial mSerial;
ตัวอย่างการใช้งาน miniSerial พร้อมทั้งกะพริบหลอด LED ที่เชื่อมต่อกับ PA3
#include <miniSerial.h>
unsigned long t0;
void setup(void)
{
Serial.begin(9600);
// Serial.begin(19200, PA2, PA3);
pinMode(LED_BUILTIN, OUTPUT);
delay(500); // IDE's serial terminal may take a bit of wakeup time. Don't lose first chrs.
t0 = millis(); // used by loop()
Serial.print("\nminiSerial RX/TX demo - software based, non native Serial port.\n");
Serial.print("Transmit is unbuffered, Receive is buffered.\n");
Serial.print("Type some input. Demo: Buffer is read each second.\n");
}
void loop()
{
Serial.run(); // ESSENTIAL FOR RX BUFFERING SYSTEM. and no delay() allowed below.
// can't use delay() so delay by a non-blocking method !!!
unsigned long t1 = millis();
if (t1 - t0 < 1000) // 1 sec
return;
t0 = t1;
// here only every 1 sec:
digitalWrite(LED_BUILTIN, 1 - digitalRead(LED_BUILTIN));
int ch;
while ((ch = Serial.read()) >= 0) // read any/all chrs from buffer
{
Serial.print("From buffer: ");
Serial.println(ch); // send it back out
}
}การหา Prime Number
จากตัวอย่างการใช้ RS232 เมื่อรวมกับการหา Prime Number จากบทความ LGT8F328P และ ET-BASE AVR EASY4809 เมื่อนำมาใช้กับ STM32F030F4P6 จะเป็นดังนี้ และผลของการทำงานเป็นดังภาพที่ 19
#include <miniSerial.h>
#include <math.h>
bool isPrimeNumber(uint16_t x) {
uint16_t i;
for (i = 2; i < x; i++) {
if (x % i == 0) {
return false;
}
}
if (i == x)
return true;
return false;
}
int counter = 0;
uint32_t t0, t1;
void testPrimeNumber(uint16_t maxN) {
t0 = millis();
for (uint16_t n = 2; n < maxN; n++) {
if (isPrimeNumber(n)) {
counter++;
}
}
t1 = millis();
}
void setup(void)
{
Serial.begin(9600);
testPrimeNumber(2000);
Serial.print("Found ");
Serial.print(counter, DEC);
Serial.print(" in ");
Serial.print(int(fabs(t1 - t0)), DEC);
Serial.println(" milliseconds.");
}
void loop(void)
{
}
I2C Client
จากบทความการสั่งงาน esp8266/esp32 ที่ใช้ MicroPython แล้วสั่งงานควบคุม Arduino Uno ผ่านทางบัส I2C นั้น เมื่อทางทีมเราได้ทดลองกับ stm32f030f4p6 โดยโค้ดของ Micropython เป็นดังนี้
#code-02 โค้ดของ ESP8266
from machine import Pin, I2C
import time
sclPin = Pin(5)
sdaPin = Pin(4)
devAddr = const(0x17)
devLedAddr = const(0x00)
devSpkAddr = const(0x01)
devBuffer = bytearray(2)
i2c = I2C(sda = sdaPin, scl = sclPin )
time.sleep_ms(250)
print("Begin of Program")
print(i2c.scan())
for i in range(10): # blink
devBuffer[0] = devLedAddr
devBuffer[1] = 0
i2c.writeto(devAddr, devBuffer)
time.sleep_ms(100)
devBuffer[1] = 1
i2c.writeto(devAddr, devBuffer)
time.sleep_ms(100)
print("End of Program")และโค้ดการทำงานฝั่ง stm32 เพื่อรับคำสั่งจาก I2C สำหรับเปิดและปิด LED ที่ต่ออยู่กับขา PA4 และการเชื่อมต่อกับบัส I2C กระทำโดยใช้ขา PA10 กับขา PA9
////////////////////////////////////////////////////////////////////////
// i2c client
// STM32F030F4P6
// Address 0x17
// Input
// Byte 1
// 0 Blink LED : PA4
// (C) 2021, JarutEx
////////////////////////////////////////////////////////////////////////
#include <Wire.h>
int unoAddr = 0x17;
#define ledPin PA4
void i2cReceive( int bytes ) {
uint8_t dInput = Wire.read(); // command
uint8_t dValue = Wire.read(); // argument
if (dInput == 0) { // Flash
if (dValue == 0) {
digitalWrite(ledPin, HIGH);
} else if (dValue == 1) {
digitalWrite(ledPin, LOW);
}
}
}
void i2cRequest() {
Wire.write(0x00);
}
void setup() {
pinMode( ledPin, OUTPUT );
digitalWrite( ledPin, HIGH); // off LED
Wire.begin(unoAddr);
Wire.onReceive(i2cReceive);
Wire.onRequest(i2cRequest);
}
void loop() {
}สรุป
จากบทความนี้จะพบว่าการใช้งาน STM32F030F4P6 นั้นมีขั้นตอนที่ต้องกระทำอย่างเป็นนิจคือ เลือกโหมดว่ากำลังจะอัพโหลดโปรแกรมหรือรันโปรแกรม ต้องเตรียมสาย Serial เพื่อทำ ISP หรือใช้ ST-Link ผ่าน SWD ต้องเลือกโหมดทำงานของ STM32CubeProgrammer ว่าเป็น Serial หรือ SWD ให้ตรงกัน ที่สำคัญต้องเพิ่มโค้ดของ Brain Lavery เพื่อสื่อสาร RS232 ได้ถูกต้อง จะเห็นว่ามีขั้นตอนที่ละเอียดกว่าบอร์ด Arduino รุ่นอื่น ๆ และเมื่อเทียบกับบอร์ด STM32 ที่ทาง ETT ออกแบบให้สามารถเลือกโหมดด้วยการกดสวิตช์และใช้สาย Serial แบบ RS232 ในการอัพโหลดนับว่าสะดวกกว่า แต่อย่างไรก็ดี ด้วยราคาและประสิทธิภาพที่นับว่าดีกว่า Arduino แบบ 8 บิต จึงนับได้ว่าเป็นทางเลือกที่ดีทางหนึ่งสำหรับการเลือกเส้นทางการพัฒนางานสมองกลฝังตัวด้วย Cortex-M0 สุดท้ายนี้ขอให้สนุกกับการเขียนโปรแกรมครับ
หากท่านอยากพูดคุยหรือแลกเปลี่ยนกันสามารถคอมเมนท์ไว้ได้เลยครับ
แหล่งอ้างอิง
(C) 2020-2021, โดย อ.ดนัย เจษฎาฐิติกุล/อ.จารุต บุศราทิจ
ปรับปรุงเมื่อ 2021-06-29, 2021-07-03, 2021-10-06