Posted inArduino Arduino C/C++ English esp8266 STM32
[EN] Arduino : RTC DS1302
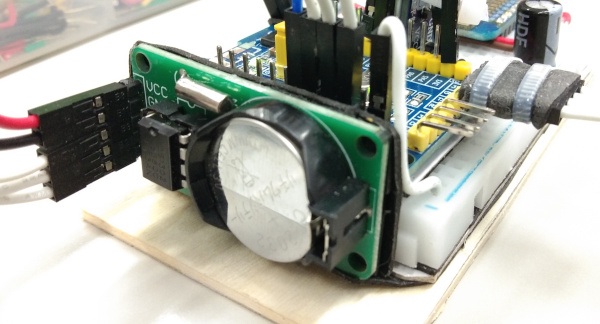
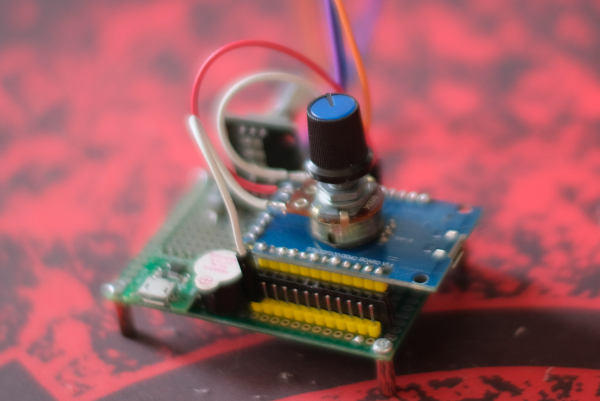
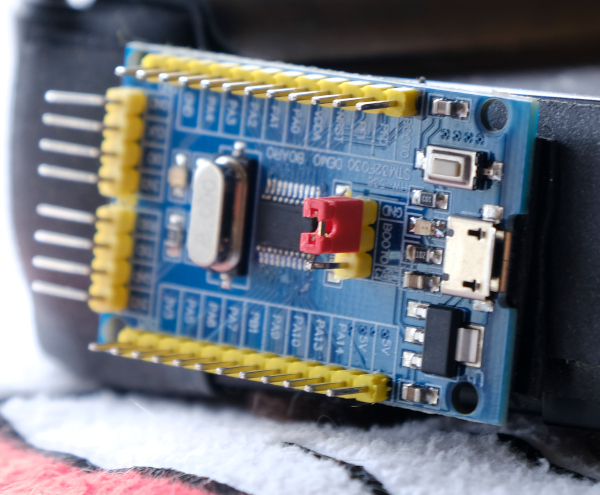
From the article programming Python on Micropython to use RTC number DS1302, this time, we change the programming language to C++ for Arduino by using STM32F030F4P6 Cortex-M0, esp8266 and Arduino Mega as a worker instead of ESP32 as shown in Figures 1, 2 and 6 by show the report on the RS232 port to display the date and time as shown in Figure 4.