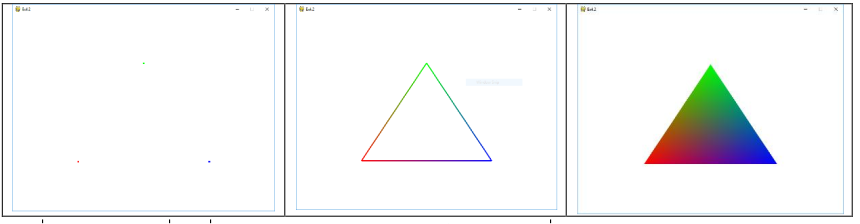
This article uses the Python programming language of the Raspberry Pi board with OpenGL to render a 3D image of a rectangular box rotated towards the X, Y and Z axes.
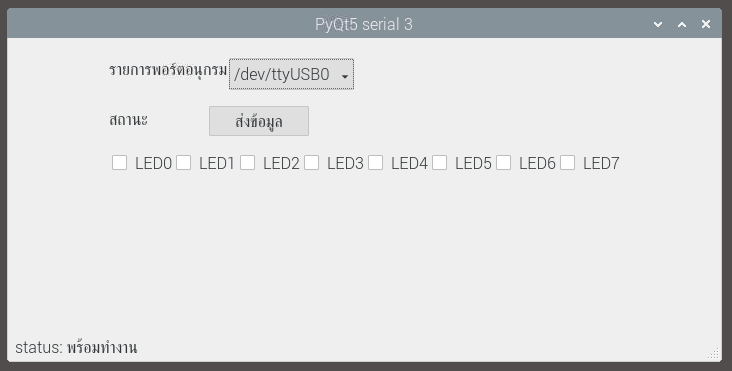
This article provides an example of opening a window and using a button in response to PyQt5, which is the basis for using the other components. The highlight of Qt is that it is a cross-platform C++ development kit and covers the integration for compatibility with languages such as PyQt, “The python binding for the Qt cross-platform C++ framework” developed by Riverbank Computing Limited, currently released in PyQt 6.1.1 (2021-06-29).
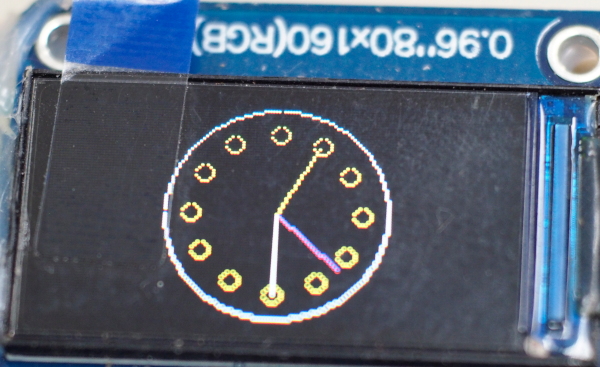
This article describes the MicroPython GY-271 digital compass sensor for use with the ESP8266 or ESP32 (we have experimented with STM32F411CEU6 with Raspberry Pi 3B+ and 4B and found that it can be used as well) to set the operation and read the X,Y and Z axis values from the sensor, then calculate it as the degree of north.
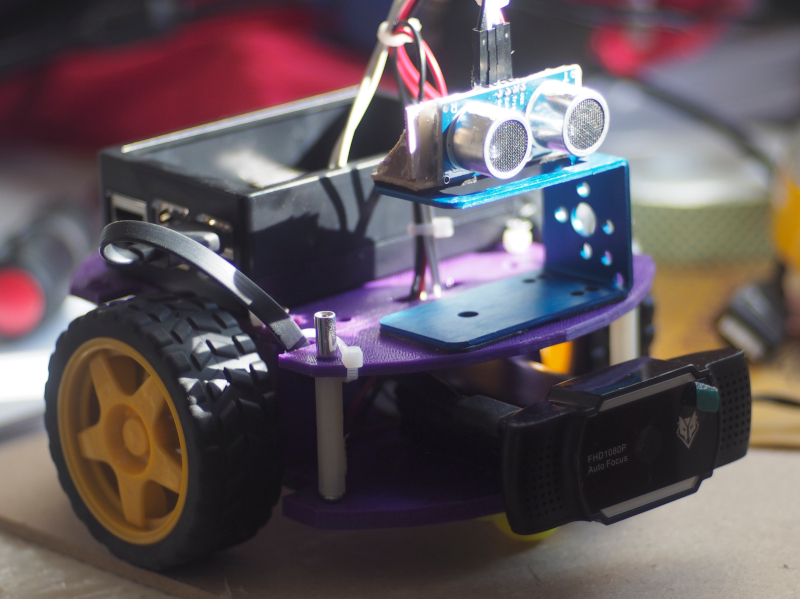
This article is programming in Python to drive a robot moving with wheels. VisionRobo car is a robot kit that is equipped with a DC motor that is attached to a wheels gear set. It uses a circuit to drive a DC motor connected to Raspberry Pi Board and connect a USB WebCamera Module and Ultrasonic Sensor Module for image processing and calculate the distance of the robot to the surrounding objects.